VisionAI - Subject Noise Filter (SNF)
A breakthrough algorithm achieving 96.1% accuracy in vision-based trail counting through intelligent subject noise filtering.
Executive Summary
Waypoint Telemetry is a vision-based analytics technology company that solves complex telemetry problems for the outdoors. Our VisionAI system has been developed to analyze trail camera telemetry data at scale and across sites to produce high-accuracy, multimodal analytics for trail use.
This report summarizes a recent advancement in our VisionAI system, called Subject Noise Filtering (SNF), which has brought our overall detection error rate of human subjects from 30.10% in our initial pilot to just 3.88%.
Our studies show that the SNF algorithm is particularly effective in high-use, crowded scenarios where groups, children, and multi-modal activity is occurring.
The Problem
Vision-based analysis offers a powerful upgrade over traditional IR sensors for trail counting. However, AI algorithms must meet and exceed the accuracy and reliability of traditional IR methods to be a viable replacement.
Subject Noise Challenge
This report demonstrates and explains the issue of subject-noise and the implementation of the subject-noise filter (SNF) to eliminate undesirable false positives associated with subject noise due to real-world occurrences such as loitering, playing, backtracking, and more.




Solution
Outdoor recreation monitoring has been predominantly sourced from traditional IR counters, which detect objects crossing a line of sight across a path. This is similar to the detection you see in front of grocery stores that trigger automatic doors. Any obstruction across the IR sensor (subject to some algorithmic filtering) will trigger a "subject detection."
- •Animal crossings causing false positives
- •Missed detections in groups
- •Over-detection due to loitering or staggering of subjects
Vision-based technology has been the focus of Waypoint Telemetry. In this study, we use off-the-shelf trail cams to detect movement of subjects, then apply vision-based AI analysis to process the imagery and detect people, objects, activities, and other activity attributes.
Multi-modal Object Detection
In modern software architecture today, off-the-shelf libraries and AI models exist to classify photos. These range from light-weight, pre-trained models up to frameworks that support custom training. The model we have leveraged is the YOLO family of image object classification, which produces an array of detected objects from an image and associated confidence scores.
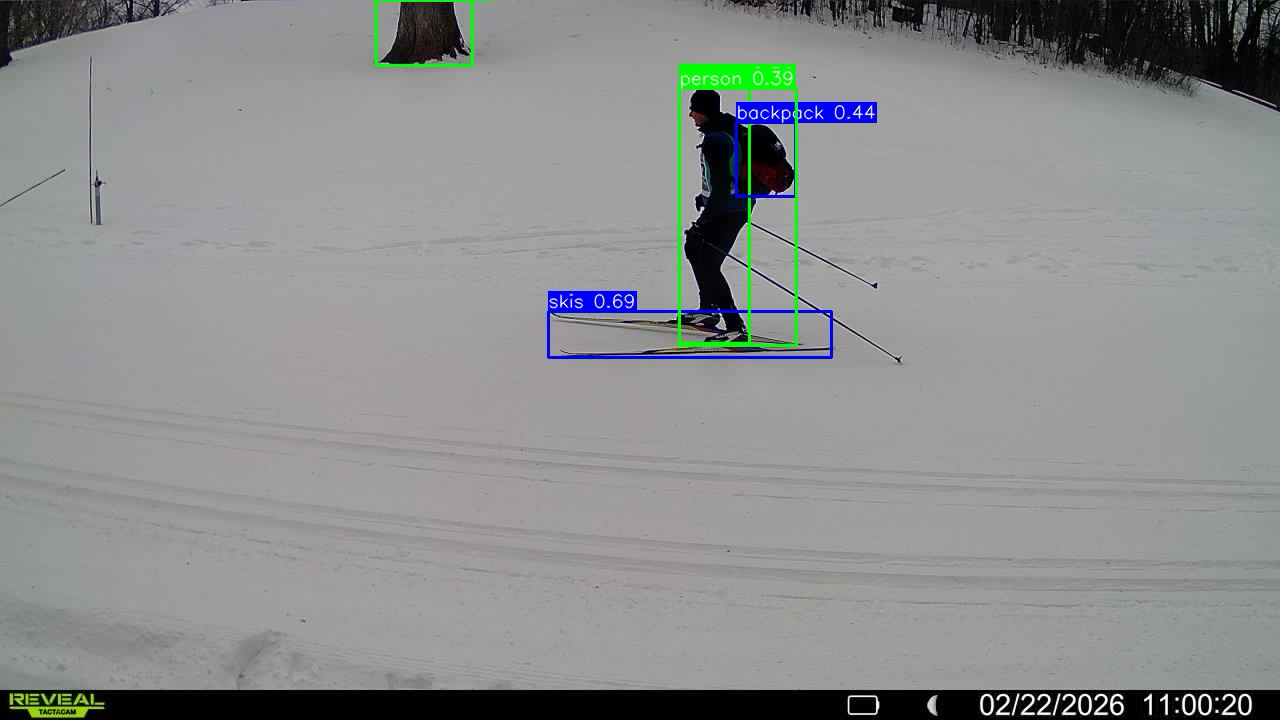
Identifying Unique Subjects
Reverse Embedding Technology
We use reverse embedding vision technology to assign an embedding code for each detected subject within a window of images, and use similarity scores to determine if the same individual is in the frame within a specific time-frame.
This allows us to detect "noisy appearances" such as staggering, loitering, or other duplicate appearances of individuals. Each individual is assigned a unique embedding sequence and unique ID. Subsequent detected subjects are then checked for uniqueness.
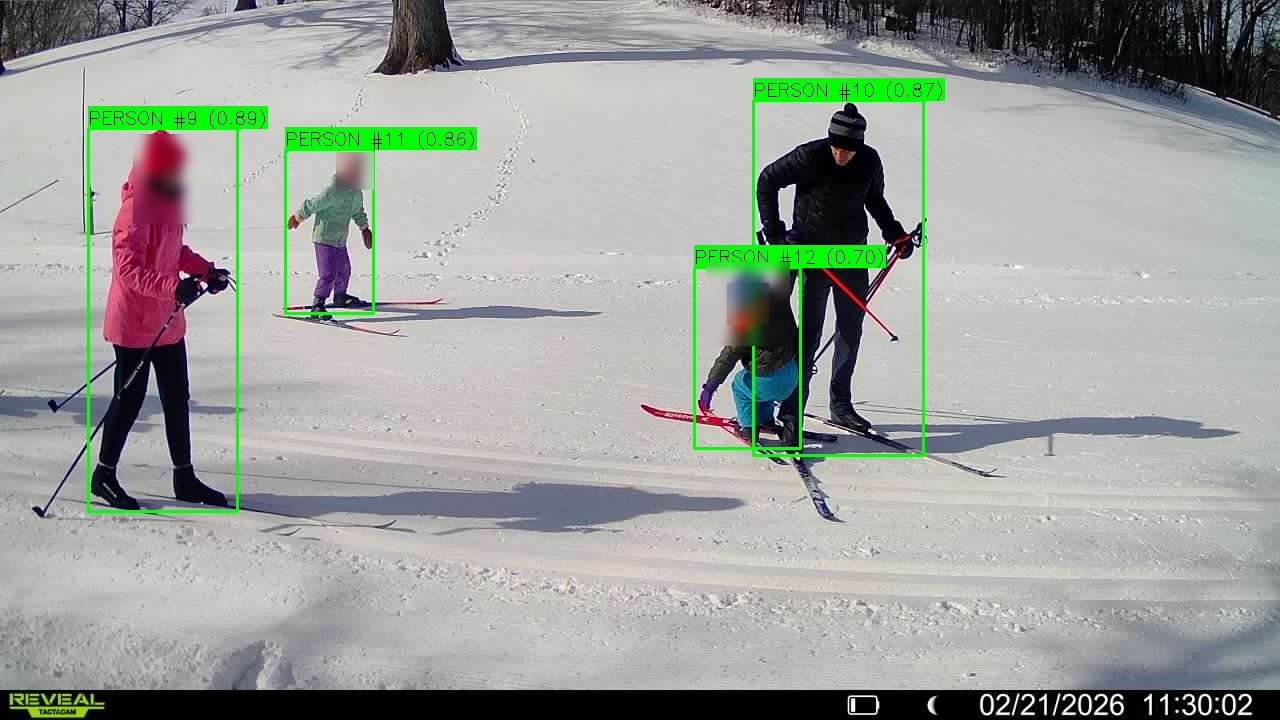
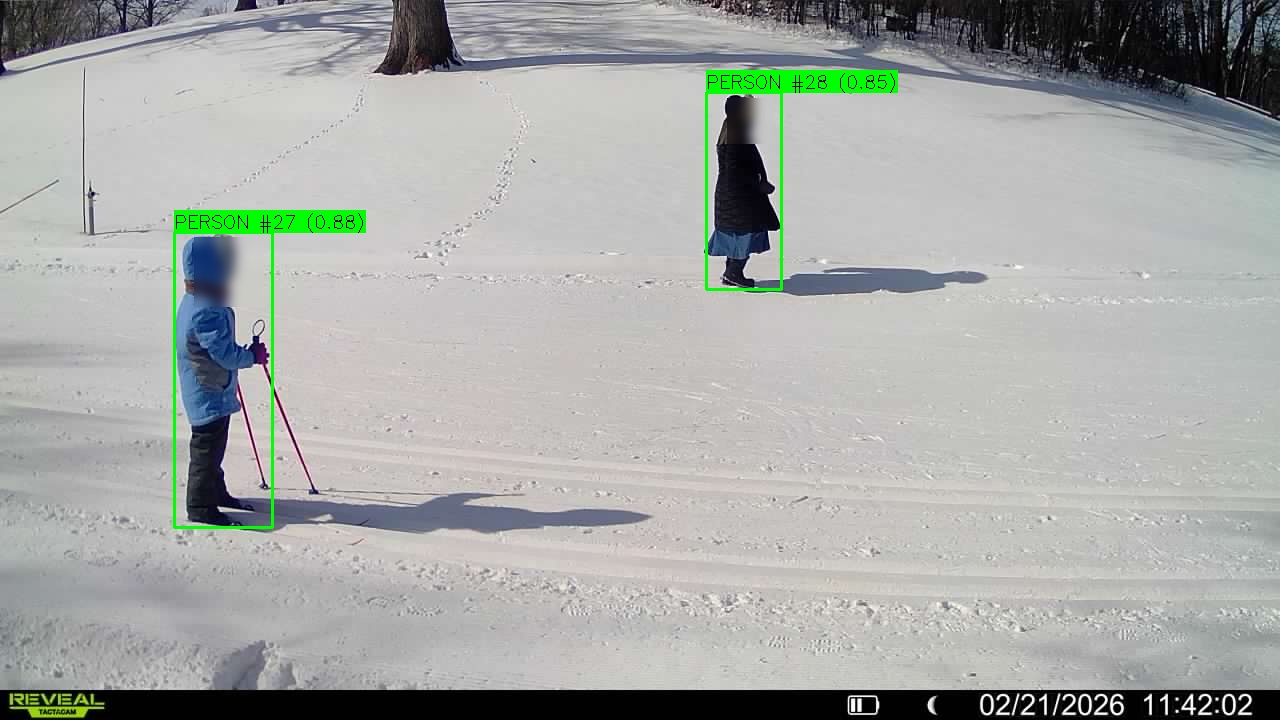
Scenes, Confidence Scores and Similarity Scores
In the example below, we have two consecutive images taken less than 2 minutes apart. Both images clearly have the same two individuals. Using the SNF, we can see that the first image has unique individuals labeled. The next image properly detects them as duplicates and disregards them in the count, as expected in a high-accuracy counting system.

Dynamic Scene Adjuster
In our testing, we found that different scenes require different approaches to our multi-modal detection libraries and SNF filters. Our ability to differentiate between different activities and distinguish unique individuals decreases with poorer environments.

Dynamic Adjustment
Our SNF feature dynamically adjusts to the detected environment, optimizing detection parameters based on lighting conditions, visibility, and scene complexity.
Noise vs Reappearances
One important discussion point for the SNF implementation is the difference between noise and reappearances. Often in trail environments, a subject will enter a trail system and leave at the same location. These reappearances typically happen 15-90 minutes apart, almost never within 5 minutes.
The intention of the SNF is NOT to address filtering out individuals who re-appear in a trail system, but to filter out noise of subjects triggering multiple detections.
If a subject is detected consecutively within a 2-minute window, that subject will only be counted once. The detection continues to be filtered until at least 2 minutes have passed without that person appearing.


Privacy
Privacy-First Approach
Given the sensitive nature of capturing real-world recreational activity, privacy is a critical consideration for trail counting applications. This particular study was conducted entirely on a local computer with no cloud storage of images or examples.
Facial Blur
ImplementedAll detected subjects go through our VisionAI pipeline which includes a final step of 'head blur' to ensure that identifiable facial imaging is blurred prior to saving results to any cloud or computer.
30-Day Retention Policy
PlannedFor our Waypoint Cloud platform, we have a 30-day retention policy planned whereby all source images are only retained for 30 days and automatically deleted thereafter. This allows users to utilize auditability and traceability while minimizing privacy and security risks.
Cloud Security - SOC2
PlannedA standard security and privacy framework (SOC2) is planned for our Waypoint Cloud architecture. Today, we have tight row-level-security (RLS) limiting access to cloud resources to only members and organizations which the resources belong.
Methods
Real-world applications of counting technologies in outdoor recreation involve many variables. In this study, we looked at 6 scenarios to demonstrate the problem scope and solution efficacy, using real camera captures from a pilot study at Three Rivers Parks in Bloomington, MN.
Weather & Visibility
Bright sun, gray clouds, night time, rain, snow
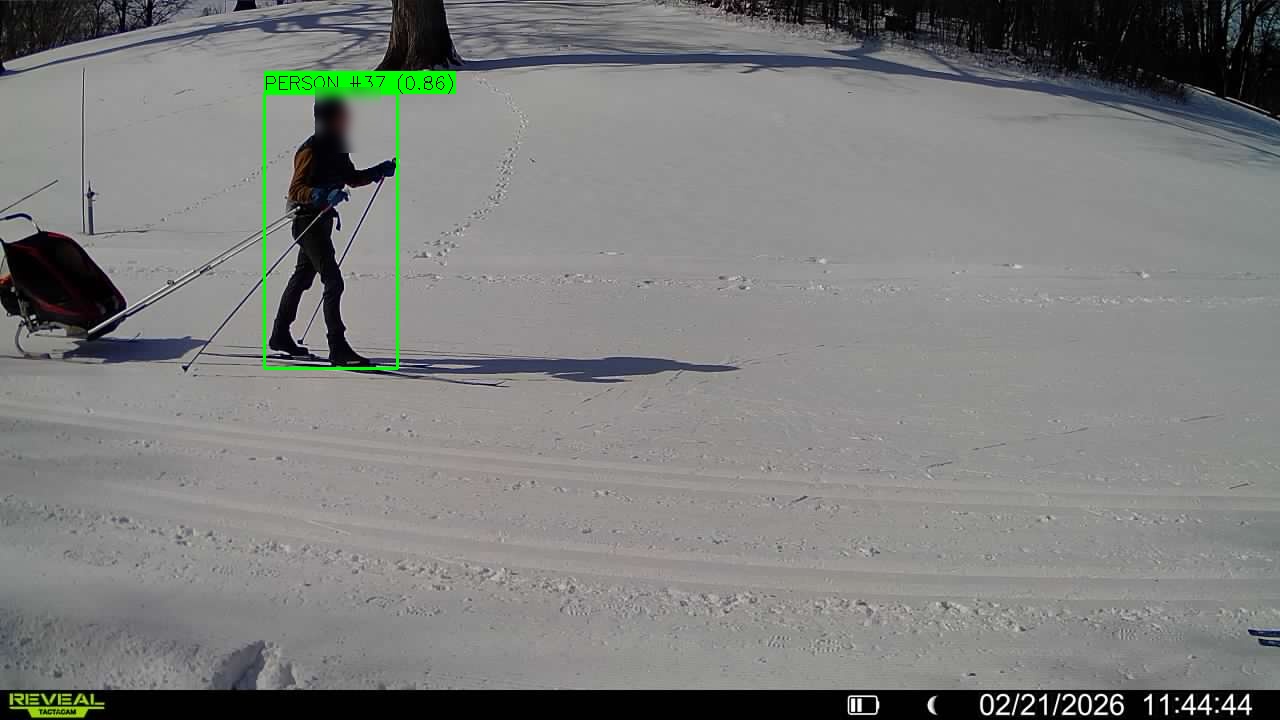
Multi-modal Subjects
Skiing, hiking, running, biking, snowmobiling
Animal Integration
Animal detections producing false positives
Groups & Crowds
Multiple people moving together
Test Environments
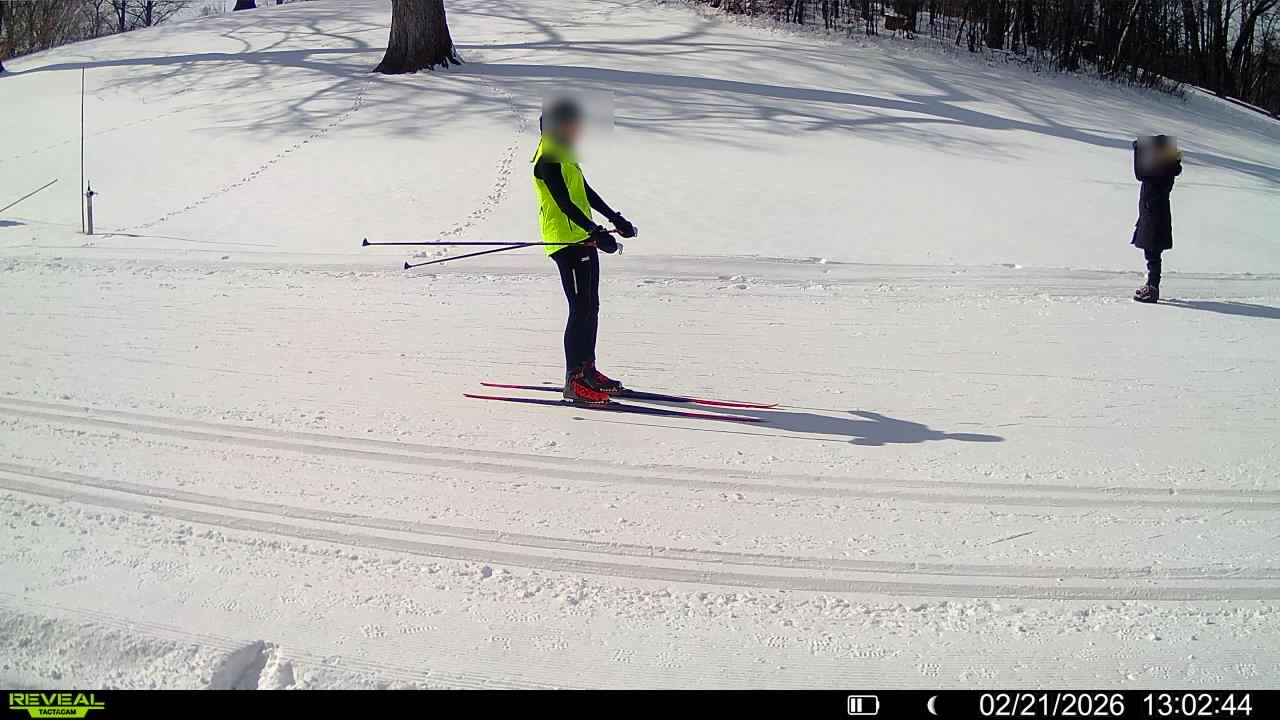
Environment 1: Bright Sun, Busy Cross Country Ski Trail
Children and Families
Environment 2: Bright Sun, Busy Cross Country Ski Trail
Second Round with different crowds

Environment 3: Early Morning, Gray Clouds
Snow fall, fast skiers

Environment 4: Full Day (Dawn, Day, Evening)
Multimodal trail 1
Environment 5: Full Day (Dawn, Day, Evening)
Multimodal trail 2

Environment 6: Night-time Skiing
Low visibility conditions
Candidate Evaluations
Going through each detected image sequence and counting by hand: total images, images with people, total unique individuals. This method is considered 'truth' for error rate calculation.
Does not account for false negatives (subjects where the trail cam did not trigger).
Simple AI pipeline with minimal customizations. Used YOLOv8 to detect people with a default confidence score cutoff of 0.25 for all environments with no additional filters.
Used in TRPD trail study from 2/16/2026-3/4/2026.
The advanced algorithm being evaluated with Subject Noise Filter, custom AI vision model for trail directionality, 1st stage multi-modal detection with dynamic confidence scoring.
- ✓Subject-noise-filter with unique subject embeddings
- ✓Dynamic similarity scores for near-consecutive frames
- ✓Custom AI vision model for trail directionality
- ✓General confidence threshold of 0.5
Results
The table below shows total unique individuals detected after filtering, not raw detection counts. This measures how well each approach identifies distinct people while filtering out noise from repeated detections, loitering, and other false positives.
Across all 6 test environments, error rates for identifying unique individuals were:
The SNF dramatically improved accuracy in filtering noise while maintaining correct unique individual counts.
The real performance improvements come in noise from real-world environments:
These situations include animal crossings, groups walking, multimodal activities triggering multiple times (skis+person+poles or bike), staggering, loitering, children playing, etc. In these real-world cases:
| Test Case | Baseline | VisionAI - v1 (C=0.25) | VisionAI - v1 (C=0.5) | VisionAI - v2 |
|---|---|---|---|---|
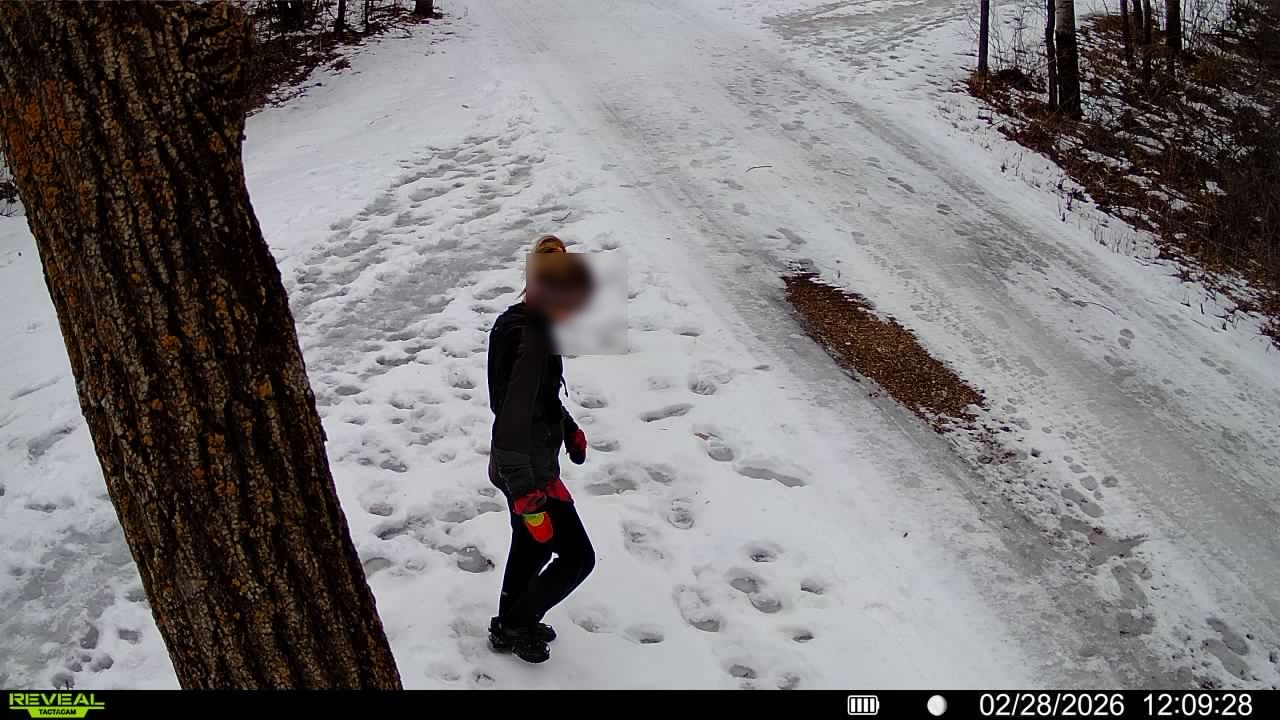
| 2-28-26 carrier | 9 | 10 | 10 | 10 |
| early-morning-walkers-dark | 17 | 20 | 17 | 17 |
| gray-fast | 16 | 18 | 16 | 14 |
| night | 14 | 14 | 14 | 14 |
| sunny-crowded | 15 | 34 | 24 | 15 |
| sunny-crowded-2 | 32 | 162 | 53 | 37 |
| Totals | 103 | 258 | 134 | 107 |
| Error Rate | — | 150.49% | 30.10% | 3.88% |
Conclusion
Vision-based trail activity monitoring is an exciting approach that unlocks several key benefits compared to traditional IR trail counting.
Advanced Noise Filters
Vision-based AI analysis allows for more advanced noise filters critical for real-world scenarios such as loitering, groups, human-animal groups like dog-walkers.
Multi-modal Detections
Activity detections enable better accuracy through human/object/animal filtering that traditional IR counters cannot do.
Modern Trail Cam Technology
Coupling off-the-shelf trail cam technology with proprietary AI systems and cloud-based software enables reliable, high-accuracy trail counting.
Final Result
By coupling modern off-the-shelf trail cam technology with proprietary AI systems and cloud-based software, vision-based technology can be reliably used for trail counting purposes with high accuracy. The introduction of SNF brought our error rate down to 3.88% across a wide variety of challenging environments.
Appendix
| Test Case | Total Images | Images w/ People | Total Detections | Actual Subjects | Actual Uniques | Detected People | Detected Uniques | Missed | Bad Det. |
|---|---|---|---|---|---|---|---|---|---|
| 2-28-26 carrier | 14 | 10 | 10 | 9 | 9 | 10 | 10 | 0 | 1 |
| early-morning-walkers-dark | 20 | 15 | 17 | 17 | 17 | 20 | 17 | 0 | 0 |
| gray-fast | 16 | 16 | 16 | 18 | 16 | 18 | 14 | 2 | 0 |
| night | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 0 | 0 |
| sunny-crowded | 13 | 13 | 21 | 22 | 15 | 34 | 15 | 1 | 0 |
| sunny-crowded-2 | 33 | 31 | 52 | 53 | 32 | 162 | 37 | 1 | 0 |